
Mars Reconnaissance Orbiter
Renseignements généraux
SOS Enfants, qui se déroule près de 200 sos écoles dans le monde en développement, a organisé cette sélection. Cliquez ici pour plus d'informations sur les enfants SOS.
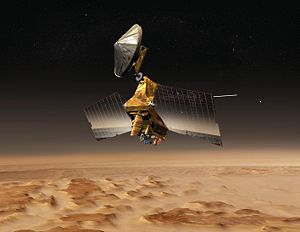 Image conceptuelle représentant la sonde Mars Reconnaissance Orbiter dans un faible planète orbite elliptique autour de Mars | |
| Opérateur | NASA / JPL |
|---|---|
| Les principaux entrepreneurs | Lockheed Martin Space Systems Université de l'Arizona Laboratoire de physique appliquée Agence spatiale italienne Malin Space Science Systems, |
| Type de mission | Orbiter |
| Satellite | Mars |
| Orbital la date d'insertion | 2006-03-10 21:24:00 UTC |
| Orbites | 93 ° d'inclinaison à 15h00 signifie solaire finale orbite héliosynchrone temps locale la science primaire |
| Date de lancement | 2005-08-12 11:43:00 UTC |
| fusée porteuse | Atlas V-401 |
| Site de lancement | Complexe de lancement spatial 41 Base de lancement de Cap Canaveral |
| Durée de la mission | Mission principale:> 2 ans écoulé: 7 ans, 7 mois et 8 jours (2703 sols) |
| COSPAR ID | 2005-029A |
| Page d'accueil | http://marsprogram.jpl.nasa.gov/mro/ |
| Masse | 2180 kg (£ 4,800) alimentés 1031 kg (£ 2,270) secs |
| Puissance | 2,000.0 W |
| Références: | |
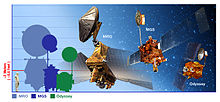
Mars Reconnaissance Orbiter (MRO) est un multifonction vaisseau spatial conçu pour effectuer une reconnaissance et d'exploration de Mars depuis l'orbite. Les États-Unis $ 720 000 000 vaisseau a été construit par Lockheed Martin sous la supervision de la Jet Propulsion Laboratory. La mission est géré par le JPL, au California Institute of Technology, La Canada Flintridge, Californie, pour la NASA Direction des missions scientifiques, Washington, DC Il a été lancé le 12 Août 2005, et a atteint l'orbite martienne le 10 Mars, 2006. En Novembre 2006, après cinq mois de aérofreinage, il est entré dans son orbite de science finale et a commencé sa phase scientifique primaire. Comme MRO est entré en orbite, il a rejoint cinq autres engins spatiaux actif qui étaient soit en orbite ou sur la surface de la planète: Mars Global Surveyor, Mars Express, Mars Odyssey, et deux Mars Exploration Rovers ; au moment où un record pour le vaisseau spatial le plus opérationnelle dans le voisinage immédiat de Mars.
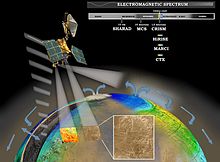
MRO contient une foule d'instruments scientifiques tels que des caméras, spectromètres et radar , qui sont utilisés pour analyser la reliefs, stratigraphie, minéraux, et la glace de Mars. Il ouvre la voie à de futures missions en surveillant de Mars le jour la météo et les conditions de surface, qui étudient les sites potentiels d'atterrissage, et l'hébergement d'un nouveau système de télécommunications. Le système de télécommunications de MRO transférer plus de données vers la Terre de toutes les missions interplanétaires précédentes combinées, et MRO servira de satellite de relais très capable pour de futures missions.
Pré-lancement
MRO a été l'une des deux missions envisagée pour Mars 2003 lancer fenêtre; Toutefois, pendant le processus de proposition de l'orbiteur a perdu contre ce qui est devenu connu comme les Mars Exploration Rovers . La mission de l'orbiteur a été reportée pour le lancement en 2005, et la NASA a annoncé son nom définitif, Mars Reconnaissance Orbiter, le 26 Octobre 2000.
MRO est calquée NASA très réussie Mars Global Surveyor de procéder à la surveillance de Mars depuis l'orbite. Les premières spécifications du satellite inclus un grand appareil photo pour prendre des photos de Mars en haute résolution. À cet égard, Jim Garvin, le programme d'exploration de Mars scientifique pour la NASA, a proclamé que MRO serait un "microscope en orbite". Le satellite était aussi inclure un spectrographe visible-proche infrarouge.
Le 3 Octobre 2001, la NASA a choisi Lockheed Martin comme entrepreneur principal pour la fabrication de l'engin spatial. À la fin de 2001 tous les instruments de la mission ont été sélectionnés. Il n'y avait pas d'importants revers au cours de la construction de MRO, et le vaisseau spatial a été déplacé à Centre spatial John F. Kennedy, le 1er mai 2005 pour le préparer pour le lancement.
Objectifs de la mission
Opérations scientifiques MRO ont été initialement prévues pour durer deux années terrestres, de Novembre 2006 à Novembre 2008. L'un des principaux objectifs de la mission est de cartographier le paysage martien avec ses caméras à haute résolution afin de choisir des sites d'atterrissage pour les futures missions de surface. Le MRO a joué un rôle important dans le choix du site d'atterrissage de la sonde Phoenix , qui a exploré l'Arctique martien en Green Valley. Le site initial choisi par les scientifiques a été imagé avec le Caméra HiRISE et déclaré être jonchées de rochers. Après analyse de la HiRISE et THEMIS un nouveau site de Mars Odyssey a été choisi. Mars Science Laboratory, un rover très maniable, a également son site d'atterrissage inspecté. Le MRO a fourni des données de navigation critiques lors de leurs débarquements et agit comme un relais de télécommunications.
MRO utilise son matériel scientifique à bord d'étudier la Climat martien, la météo, l'atmosphère, et la géologie, et de rechercher des signes de eau liquide dans les calottes polaires et souterrain. En outre, MRO est à la recherche des vestiges de l'auparavant perdu Mars Polar Lander et Beagle 2 vaisseau spatial. Après ses principales opérations scientifiques sont terminées, mission prolongée de la sonde est d'être le système de communication et de navigation pour les atterrisseurs et des sondes de Rover.
Lancement et l'insertion orbitale


Le 12 Août 2005, MRO a été lancé à bord d'un Atlas V-401 fusée Complexe de lancement spatial au 41 Base de lancement de Cap Canaveral. Le Étage supérieur de la fusée Centaur a achevé ses brûlures sur une période de cinquante-six minutes et placé dans un MRO interplanétaire orbite de transfert vers Mars.
MRO a survolé l'espace interplanétaire pour sept mois et demi avant d'atteindre Mars. En route la plupart des instruments scientifiques et des expériences ont été testés et calibrés. Pour assurer le bon insertion orbital après avoir atteint Mars, quatre manœuvres de correction de trajectoire ont été planifiés et cinquième manoeuvre d'urgence a été discutée. Cependant, seulement trois manœuvres de correction de trajectoire étaient nécessaires, qui a sauvé £ 60 (27 kg) de carburant qui serait utilisable lors de la mission élargie de MRO.
MRO a commencé insertion orbitale en approchant Mars le 10 Mars 2006, et passant au-dessus de son hémisphère sud à une altitude de 370 à 400 km (230 à 250 km). Les six moteurs principaux de MRO brûlé pendant 27 minutes pour ralentir la sonde de 2900 à 1900 mètres par seconde (9500 à 6200 pieds / s). Le réservoir de mise sous pression de l'hélium a été plus froid que prévu, ce qui a réduit la pression dans le réservoir de carburant d'environ 21 kilopascals (3,0 psi). La pression réduite causé le moteur de poussée être diminué de 2%, mais MRO automatiquement compensée par l'extension de la durée de combustion de 33 secondes.
Achèvement de l'insertion orbitale placé l'orbiteur dans un très orbite polaire elliptique avec une période d'environ 35,5 heures. Peu de temps après l'insertion, le périastre - le point de l'orbite le plus proche de Mars - était 3806 km (2365 km) du centre de la planète (426 km (265 mi) de sa surface). Le apoapsis - le point le plus éloigné de l'orbite de Mars - était 47972 km (29 808 km) du centre de la planète (44500 km (27 700 mi) de sa surface).

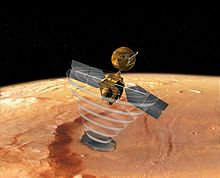
Le 30 Mars 2006, MRO a commencé le processus de aérofreinage, une procédure en trois étapes qui coupe en deux le carburant nécessaire pour atteindre une orbite inférieure, plus circulaire avec une période plus courte. Premièrement, au cours de ses cinq premières orbites de la planète (une semaine de la Terre), MRO utilisé ses propulseurs d'abandonner le périgée de son orbite en aérofreinage altitude. Cette altitude dépend de l'épaisseur de la atmosphère, car martiennes densité atmosphérique change avec ses saisons. Deuxièmement, tout en utilisant ses propulseurs pour apporter des corrections mineures à son altitude de périgée, MRO maintenu aérofreinage altitude pour 445 orbites planétaires (environ 5 mois de la Terre) pour réduire le apogée de l'orbite à 450 km (280 mi). Cela a été fait de telle manière afin de ne pas chauffer la sonde trop, mais aussi assez tremper dans l'atmosphère pour ralentir l'engin spatial vers le bas. Après le processus était complète, MRO utilisé ses propulseurs pour déplacer son périgée sur le bord de l'atmosphère martienne le 30 Août 2006.
En Septembre 2006 MRO tiré ses propulseurs deux fois plus pour peaufiner sa dernière orbite, presque circulaire à environ 250 à 316 kilomètres (160 à 196 km) au-dessus de la surface martienne. Le Sharad antennes radar ont été déployés sur 16. Septembre Tous les instruments scientifiques ont été testés et la plupart ont été éteints avant la conjonction solaire qui a eu lieu du 7 Octobre to 6 Novembre 2006. Après la conjonction mis fin à la "phase scientifique primaire» a commencé.
Le 17 Novembre 2006 la NASA a annoncé le test réussi de la MRO comme un relais de communication orbital. Utilisation du rover de la NASA " Esprit "comme point d'origine pour la transmission, le MRO a agi comme un relais pour la transmission de données vers la Terre.
Manifestations et découvertes

Le 29 Septembre 2006 ( Sol 402), MRO a pris sa première image haute résolution de son orbite de la science. Cette image est dit pour résoudre éléments aussi petits que 90 cm (3 pieds) de diamètre. Le 6 Octobre, la NASA a publié des images détaillées de la MRO des Cratère Victoria avec le Rover Opportunity sur la jante au-dessus. En Novembre, les problèmes ont commencé à apparaître dans le fonctionnement des deux instruments de l'engin spatial MRO. Un mécanisme pas à pas dans le Mars Climate Sounder (MCS) a sauté à plusieurs reprises résultant dans un champ de vision qui est légèrement hors de position. En Décembre opérations normales de l'instrument a été suspendu, mais une stratégie d'atténuation permet à l'instrument de continuer à faire la plupart de ses observations destinés. En outre, une augmentation du bruit et résultant mauvaise pixels a été observée dans plusieurs CCD de la Haute Resolution Imaging Experiment Science (HiRISE). L'utilisation de cet appareil photo avec un temps plus long warm-up a atténué la question. Cependant, la cause est encore inconnue et peut revenir.
HiRISE continue de renvoyer des images qui ont permis des découvertes concernant la géologie de Mars. Au premier rang de ceux-ci est l'annonce d'observations de terrain bagués indiquant la présence et l'action de liquide de dioxyde de carbone (CO 2) ou de l'eau sur la surface de Mars dans son passé géologique récent. HiRISE a pu photographier l' atterrisseur Phoenix lors de sa descente à parachuté Vastitas Borealis sur le 25 mai 2008 (sol 990).
L'orbiteur a continué d'éprouver des problèmes récurrents en 2009, dont quatre réinitialisations spontanées, aboutissant à une de quatre mois arrêt de l'engin spatial d'Août à Décembre. Tandis que les ingénieurs ne ont pas déterminé la cause de la réinitialisation récurrents, ils ont créé un nouveau logiciel pour aider à résoudre le problème devrait-il se reproduire.
Le 6 Août 2012 (La Sol 2483, l'orbiteur passé au-dessus Cratère Gale, le site d'atterrissage de la La mission Mars Science Laboratory, au cours de sa La phase EDL. Il a capturé une image via la caméra HiRISE de la Curiosité rover décroissant avec son backshell et parachute supersonique.
Instruments
Trois caméras, deux spectromètres et un radar sont inclus sur l'orbiteur avec deux "instruments de science-installation», qui utilisent les données de sous-systèmes d'ingénierie pour recueillir des données scientifiques. Trois expériences technologiques permettra de tester et de démontrer de nouveaux équipements pour les futures missions. Il est prévu MRO obtiendra environ 5000 images par an.
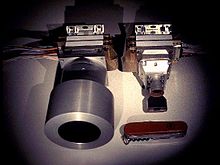
HiRISE (caméra)

La caméra haute résolution Expérience Imaging Science est un 0,5 m télescope réflecteur, la plus importante jamais réalisée sur un mission de l'espace profond, et a une résolution de 1 microradian (mrad), soit 0,3 m à une altitude de 300 km. En comparaison, images satellite de la Terre sont généralement disponibles avec une résolution de 0,5 m, et des images satellite sur Google Maps sont disponibles pour 1 m. HiRISE recueille des images en trois bandes de couleur, de 400 à 600 nm (bleu-vert), BG ou de 550 à 850 nm (rouge) et de 800 à 1000 nm ( proche infrarouge ou NIR).

Images de couleurs rouges sont 20264 pixels à travers (6 km de large), et BG et NIR sont 4048 pixels à travers (1,2 km de large). Ordinateur de bord de HiRISE lit ces lignes dans le temps avec l'orbiteur de la vitesse au sol, et les images sont potentiellement illimité dans la longueur. Pratiquement cependant, leur longueur est limitée par l'ordinateur de 28 Gigabit (Gb) de capacité de la mémoire, et la taille maximale nominale est de 20.000 × 40 000 pixels (800 mégapixels) et 4000 × 160 pixels (40 000 mégapixels) pour BG et NIR images. Chaque image 16,4 Gb est comprimé à 5 Gb avant la transmission et relâchez pour le grand public sur la Site HiRISE dans Format JPEG 2000. Pour faciliter la cartographie des sites potentiels d'atterrissage, HiRISE peut produire des paires stéréo d'images à partir de laquelle on peut calculer la topographie avec une précision de 0,25 m. HiRISE a été construit par Ball Aerospace & Technologies Corp.
CTX (caméra)
La caméra de contexte (CTX) fournit images en niveaux de gris (500 à 800 nm) avec un résolution jusqu'à environ 6 m de pixel. CTX est conçu pour fournir un contexte maps pour les observations ciblées de HiRISE et CRISM, et est également utilisé pour la mosaïque de vastes zones de la planète Mars, suivre un certain nombre d'emplacements pour les changements au fil du temps, et d'acquérir stéréo (3D) la couverture des régions et le potentiel clés futurs sites de débarquement. Les optiques de CTX se composent d'un 350 mm distance focale Maksutov Cassegrain avec un large éventail 5064 pixel de ligne CCD. L'instrument prend des photos 30 km (19 mi) de large et a assez de mémoire interne pour stocker une image longue de 160 km avant de le charger dans le ordinateur principal . L'appareil a été construit et est exploité par Malin Space Science Systems. CTX cartographié 50% de Mars par Février 2010. En 2012, il a trouvé les impacts de six de 55 livres (25 kg) masses-entrée de ballast de L'atterrissage de Mars Science Laboratory de Curiosité rover.
MARCI (caméra)
The Mars Couleur Imager (MARCI) est un grand-angle, relativement basse résolution la caméra qui considère la surface de Mars dans cinq visible et deux ultraviolets bandes. Chaque jour, MARCI recueille environ 84 images et produit une carte mondiale avec des résolutions de pixels ayant de 1 à 10 km. Cette carte fournit une bulletin météo quotidien pour Mars, permet de caractériser ses variations saisonnières et annuelles, et des cartes de la présence de vapeur d'eau et l'ozone dans l'atmosphère. L'appareil a été construit et est exploité par Malin Space Science Systems. Il dispose d'un objectif fisheye 180 degrés avec les sept filtres couleur liés directement un capteur CCD unique.
CRISM (spectromètre)

Le Spectromètre Reconnaissance Imaging Compact pour Mars (CRISM) est un instrument visible et proche infrarouge ( VNIR) spectromètre qui est utilisée pour produire des cartes détaillées de la surface minéralogie de Mars. Il fonctionne 370-3920 nm, mesure le spectre de 544 canaux (chacun 6,55 nm de large), et a un résolution de 18 m (59 pi) à une altitude de 300 km (190 mi). CRISM est utilisé pour identifier les minéraux et les produits chimiques indicatifs de l'existence passée ou présente de l'eau sur la surface de Mars. Ces matériaux comprennent le fer, oxydes, phyllosilicates et de carbonates , qui ont des motifs caractéristiques de leur énergie visible infrarouge.
MCS (spectromètre)
Le Mars Climate Sounder (MCS) est un spectromètre à un canal visible / proche infrarouge (0,3 à 3,0 um) et huit infrarouge lointain (12-50 um) canaux. Ces canaux ont été sélectionnés pour mesurer la température, la pression, la vapeur d'eau et les niveaux de poussière. MCS observe l'atmosphère à l'horizon de Mars (vu de MRO) par le découper en tranches verticales et prendre des mesures au sein de chaque tranche dans 5 km (3 km) incrémente. Ces mesures sont assemblés dans des cartes météorologiques quotidiennes mondiale pour montrer les variables de base de la météo martienne: la température, la pression, l'humidité, et la densité de poussière.
SHARAD (radar)
Shallow Subsurface Radar (SHARAD) l'expérience de MRO est conçu pour sonder la structure interne de la polaire martienne calottes glaciaires. Il recueille également des informations planétaire sur les couches souterraines de la glace , la roche et l'eau liquide qui pourrait éventuellement être accessible à partir de la surface. SHARAD utilise Ondes radio HF entre 15 et 25 MHz, une plage qui permet de résoudre des couches aussi minces que 7 m (23 pieds) à une profondeur maximale de 1 km (0,6 mi). Il a une résolution horizontale de 0,3 à 3 km (0,2 à 1,9 mi). SHARAD est conçu pour fonctionner en conjonction avec le Mars Express MARSIS, qui a une résolution plus faible, mais pénètre à une profondeur beaucoup plus grande. Les deux SHARAD et MARSIS ont été faites par le Agence spatiale italienne.
instruments d'ingénierie
En plus de son équipement d'imagerie, MRO comporte une variété d'instruments d'ingénierie. Le forfait enquête sur le terrain Gravity mesure les variations dans le champ gravitationnel martien par des variations dans la vitesse de l'engin spatial. les changements de vitesse sont détectées par mesure décalages Doppler dans les signaux radio de MRO reçues sur Terre. Le forfait comprend également accéléromètres embarqués sensibles utilisés pour déduire la densité atmosphérique de Mars situ pendant aérofreinage.
Le Electra est un logiciel de radio UHF défini, conçu pour communiquer avec d'autres engins spatiaux à mesure qu'ils approchent, la terre, et d'exploiter sur Mars. En plus de protocole contrôlé inter-vaisseaux spatiaux liaisons de données de 1 kbit / s à 2 Mbit / s, Electra fournit également la collecte de données Doppler, l'enregistrement en boucle ouverte et un service de synchronisation très précise basée sur une 5e-13 USO. informations Doppler pour les véhicules qui approchent peut être utilisé pour le ciblage de descente finale ou de la descente et l'atterrissage trajectoire loisirs. informations Doppler sur les véhicules débarqués permettra également aux scientifiques de déterminer avec précision l'emplacement de surface de atterrisseurs et rovers martiens. Les deux MER engin spatial sur Mars actuellement utiliser une version antérieure UHF de génération de relais radio fournissant des fonctions similaires à travers l'orbiteur de Mars Odyssey. La radio Electra a prouvé sa fonctionnalité en se appuyant information et de la sonde MER, Phoenix Mars Lander et Curiosité rover.
Les images de la caméra de navigation optique les lunes martiennes, Phobos et Deimos, contre étoiles d'arrière-plan pour déterminer précisément l'orbite de MRO. Bien que l'imagerie de lune ne est pas essentiel à la mission, il a été inclus comme un test de la technologie pour en orbite et l'atterrissage des futurs engins spatiaux. La caméra de navigation optique a été testé avec succès en Février et Mars 2006. Il ya une proposition de recherche pour les petites lunes, anneaux de poussière et de vieux orbiteurs avec elle.
des données d'ingénierie
Structure
Les travailleurs de Lockheed Martin Space Systems à Denver assemblé la structure de l'engin spatial et attaché les instruments. Les instruments ont été construits au Jet Propulsion Laboratory, le Université de l'Arizona Lunar and Planetary Laboratory Tucson, Arizona, Université Johns Hopkins Applied Physics Laboratory dans Laurel, Maryland, le Agence spatiale italienne à Rome, et Malin Space Systems Sciences à San Diego. Le coût total de l'engin spatial était de 720 millions de dollars américains.
La structure est composée essentiellement de composites de carbone et plaques d'aluminium alvéolé-. Le titane réservoir de carburant occupe la majeure partie du volume et de la masse de l'engin spatial et fournit la majeure partie de sa l'intégrité structurelle. Totale de l'engin spatial de masse est inférieure à 2180 kg (4806 lb) avec une unfueled masse sèche moins de 1 031 kg (£ 2,273).
systèmes électriques

MRO obtient tout de son électricité à partir de deux les panneaux solaires, chacune d'elles pouvant se déplacer de façon indépendante autour de deux axes (de haut en bas, ou de rotation gauche-droite). Chaque panneau solaire mesure 5,35 x 2,53 m et a 9,5 m 2 (102 pi 2) couvertes de 3744 cellules photovoltaïques individuels. Son haut rendement cellules solaires à triple jonction sont capables de convertir plus de 26% de l'énergie du soleil directement en électricité et sont reliés ensemble pour produire une puissance totale de 32 volts . En Mars, chacun des panneaux produit plus de 1000 watts de puissance; en revanche, les panneaux généreraient 3000 watts en orbite terrestre comparable en étant plus proche du Soleil
MRO a deux batteries rechargeables nickel-hydrogène utilisés pour alimenter le vaisseau spatial quand il ne est pas exposé au soleil. Chaque pile a une capacité de stockage d'énergie de 50 ampères-heure (180 Kc). La gamme complète des batteries ne peut pas être utilisé en raison de contraintes de tension sur le vaisseau spatial, mais permet aux opérateurs d'étendre la vie de la batterie-une capacité précieuse, étant donné que la fuite de la batterie est une des causes les plus fréquentes de défaillance d'un satellite à long terme. Planificateurs prévoient que seulement 40% des capacités des batteries sera nécessaire au cours de la durée de vie de l'engin spatial.
Systèmes électroniques
Ordinateur principal de MRO est un 133 MHz, 10,4 millions transistor, de 32 bits, RAD750 processeur. Ce processeur est un Version durcie par irradiation d'un PowerPC 750 ou Processeur G3 avec un spécialement construit la carte mère. Le RAD750 est un successeur au RAD6000. Ce processeur peut sembler faible puissance par rapport à un moderne PC processeur, mais il est extrêmement fiable, souple, et peut fonctionner dans solar flare-ravagé l'espace profond. Le logiciel du système d'exploitation est VxWorks et a suivi des protocoles et de protection contre les défauts étendus.
Les données sont stockées dans un 160 Gb (20 Module Go) de mémoire flash composée de plus de 700 puces de mémoire, chacune avec une 256 La capacité Mbit. Cette capacité de mémoire ne est pas en fait que compte tenu de la grande quantité de données devant être acquis; par exemple, une seule image de la caméra HiRISE peut être aussi grand que 28 Gb.
détermination d'attitude
Afin de déterminer l'orbite de l'engin spatial et faciliter les manœuvres, seize capteurs solaires - huit primaires et huit sauvegardes - sont placés autour de la sonde à calibrer direction solaire par rapport au cadre de l'orbiteur. Deux suiveurs stellaires, caméras numériques utilisées pour cartographier la position de catalogués étoiles , de fournir à la NASA complète, trois axes connaissance de l'orientation de l'engin spatial et l'attitude. Un primaire et de sauvegarde Unité de mesure inertielle miniature (Mimu), fourni par Honeywell, mesure les variations de l'attitude de l'engin spatial, ainsi que toute modification non induites par gravité à sa vitesse linéaire. Chaque Mimu est une combinaison de trois accéléromètres et trois anneaux laser gyroscopes. Ces systèmes sont tous extrêmement important de MRO, car il doit être capable de pointer sa caméra à une très grande précision afin de prendre des photos de haute qualité que la mission a besoin. Il a également été spécialement conçu pour minimiser les vibrations sur le vaisseau spatial, de manière à permettre à ses instruments pour prendre des images sans distorsions causées par les vibrations.
Système de télécommunications

Le sous-système Telecom sur MRO est le meilleur système de communication numérique envoyé dans l'espace profond à ce jour et pour la première fois en utilisant la capacité approche turbo-codes. Il se compose d'un très grand (3 mètres) de l'antenne, qui est utilisé pour transmettre des données par l'intermédiaire du Deep Space Network via Fréquences en bande X à 8 GHz, et elle illustre l'utilisation de la K une bande à 32 GHz pour des débits plus élevés. Vitesse de transmission maximale de Mars devrait être aussi élevé que 6 Mbit / s, un taux dix fois plus élevé que les précédents orbiteurs Mars. La sonde porte deux en bande X 100 watts amplificateurs (dont l'un est une sauvegarde), une de 35 watts K un amplificateur -band, et deux Petits transpondeurs de Deep Space (de SDSTs).
Deux antennes à faible gain plus petits sont également présents pour la communication-taux inférieur en cas d'urgence et des événements spéciaux, tels que le lancement et Mars Orbit Insertion. Ces antennes ne ont pas des plats de focalisation et peuvent transmettre et recevoir à partir de ne importe quelle direction. Ils sont un système de sauvegarde important de veiller à ce que MRO peut toujours être atteint, même si son antenne principale est pointé loin de la Terre.
Le K un sous-système -band a été utilisé pour des fins de démonstration. En raison de l'absence de spectre à 8,41 GHz en bande X, futures à haut débit missions spatiales profondes utiliseront 32 GHz K a -band. Deep Space Network (DSN) a mis en œuvre un K -band capacités de réception à tous les trois de ses complexes (Goldstone, Canberra et de Madrid) sur son 34-m faisceau-guide d'ondes (OFEG) antenne sous-réseau. Au cours de la phase de croisière, vaisseau K a télémétrie -band a été suivi 36 fois par ces antennes prouvant fonctionnalité à toutes les antennes. K A -BAND essais ont été également prévues au cours de la phase de la science, mais pendant aérofreinage un commutateur échoué, limitant l'antenne à gain élevé en bande X à un seul amplificateur. Si cet amplificateur échoue toutes les communications en bande X à haute vitesse seront perdues. Le K une liaison descendante est la sauvegarde ne reste pour cette fonctionnalité, et depuis le K une capacité -band de l'un des transpondeurs SDST a déjà échoué, (et l'autre pourrait avoir le même problème) JPL a décidé de cesser toute K a -band démonstrations et détiennent la capacité restante en réserve.
Propulsion et contrôle d'attitude

La sonde utilise un 1175 L (310 US gal) réservoir de carburant rempli avec 1187 kg (£ 2,617) du hydrazine monopropellant. La pression de carburant est régulée en ajoutant de l'hélium gazeux sous pression provenant d'un réservoir externe. Soixante-dix pour cent du carburant a été utilisé pour l'insertion orbitale.
MRO a vingt propulseurs de moteur de fusée à bord. Six grands propulseurs produisent chaque 170 N (38 lbf) de la poussée pour un total de 1 020 N (230 lbf) principalement conçu pour l'insertion orbitale. Ces propulseurs ont été initialement conçus pour la Mars Surveyor 2001 Lander. Six propulseurs moyennes produisent chaque 22 N (5 lbf) de la poussée pour les manœuvres de correction de trajectoire et contrôle d'attitude lors de l'insertion de l'orbite. Enfin, huit petits propulseurs produisent chaque 0,9 N (0,2 lbf) de la poussée pour le contrôle d'attitude pendant les opérations normales.
Quatre roues à réaction sont également utilisés pour le contrôle d'attitude précise au cours des activités nécessitant une plate-forme très stable, comme l'imagerie haute résolution, dans laquelle même les petits mouvements peuvent entraîner un flou de l'image. Chaque roue est utilisé pour un axe de mouvement. Le quatrième (biaisé) roue est une sauvegarde au cas où l'un des trois autres roues échoue. Chaque roue pèse 10 kg (22 lb) et peut être filé aussi vite que 100 Hz ou 6000 rpm.
Découvertes et photographies
La glace d'eau dans le chapeau de glace mesurée
Les résultats publiés en 2009 des mesures radar de la calotte polaire nord ont déterminé que le volume de glace d'eau dans le chapeau est 821 000 kilomètres cubes (197 000 milles cubes), égal à 30% de la calotte glaciaire du Groenland de la Terre.
Ice exposé dans de nouveaux cratères
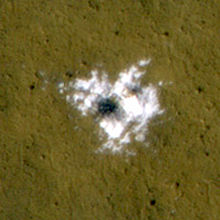
Un article paru dans la revue Science en Septembre 2009, a indiqué que de nouveaux cratères sur Mars ont fouillé la glace d'eau relativement pure. Après avoir été exposé, la glace disparaît progressivement car il sublime loin. Ces nouveaux cratères ont été trouvés et datés par la caméra CTX, et l'identification de la glace a été confirmée avec le Pacte Imaging Spectrometer (CRISM) à bord de la sonde Mars Reconnaissance Orbiter (MRO). La glace a été trouvé dans un total de cinq emplacements. Trois de ces emplacements sont en Quadrilatère Cebrenia. Ces endroits sont 55,57 ° N 150,62 ° E 43,28 ° N 176,9 ° E et 45 ° N 164,5 ° E Deux autres sont en Quadrangle de Diacria: 46,7 ° N 176,8 ° E et 46,33 ° N 176,9 ° E
Glace dans lobés tabliers de débris

Résultats de radar de SHARAD suggéré que les caractéristiques appelées Tabliers de débris lobés (ADL) contiennent de grandes quantités de glace d'eau. D'intérêt des jours de la Viking Orbiter, ces LDA sont tabliers de matériau environnant falaises. Ils ont une topographie convexe et une pente douce; cela suggère écouler de la falaise abrupte source. En outre, lobés tabliers de débris peuvent montrer linéations de surface comme des glaciers rocheux sur la Terre. SHARAD a fourni des preuves solides que les ADL dans Hellas Planitia sont les glaciers qui sont couverts d'une fine couche de débris (ce est à dire les roches et la poussière); une forte réflexion au sommet et la base des ADL a été observée, ce qui suggère que la glace d'eau pure constitue l'essentiel de la formation (entre les deux réflexions). Basé sur les expériences de l' atterrisseur Phoenix et les études de la Mars Odyssey en orbite, la glace d'eau est connue pour exister juste sous la surface de Mars dans les hautes latitudes () loin au nord et au sud.
les dépôts de chlorure
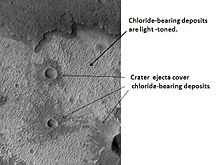
Utilisant les données de Mars Global Surveyor, Mars Odyssey et Mars Reconnaissance Orbiter de la, les scientifiques ont trouvé de vastes dépôts de minéraux de chlorure. Les preuves suggèrent que les dépôts ont été formés à partir de l'évaporation des eaux minérales enrichies. La recherche suggère que les lacs peuvent avoir été dispersés sur de vastes zones de la surface martienne. Habituellement chlorures sont les dernières minéraux à venir de la solution. Carbonates, sulfates, et de la silice devraient précipiter devant eux. Sulfates et la silice ont été trouvés par les Rovers Mars sur la surface. Lieux avec minéraux de chlorure peuvent avoir une fois occupé divers formes de vie. En outre, de telles zones pourraient conserver les traces de la vie ancienne.
Autres minéraux aqueuses
En 2009, un groupe de scientifiques de l'équipe CRISM a rapporté 9-10 classes différentes de minéraux formés en présence d'eau. Différents types de argiles (également appelés phyllosilicates) ont été trouvés dans de nombreux endroits. Les physilicates identifiés inclus smectite smectite aluminium, le fer / magnésium, kaolinite, prehnite et chlorite. Roches contenant du carbonate ont été trouvés autour de la Isidis bassin. carbonates appartiennent à une classe dans laquelle la vie aurait pu se développer. Les zones autour de Valles Marineris ont été trouvés pour contenir hydraté de silice et des sulfates hydratés. Les chercheurs ont identifié les sulfates hydratés et minéraux ferriques Terra Meridiani et Valles Marineris. Autres minéraux trouvés sur Mars étaient jarosite, alunite, hématite, opale, et le gypse . Deux à cinq des classes de minéraux ont été formées avec la droite pH et suffisamment d'eau pour permettre la vie de se développer.
Avalanches
Les Mars Reconnaissance Orbiter CTX et HiRISE caméras ont photographié un certain nombre d'avalanches hors les escarpements de la calotte polaire nord comme ils se produisaient.

Avalanche martien et de débris chutes (HiRISE 2008)

Une photo avec une échelle démontre la taille de l'avalanche.
D'autres engins spatiaux

Image de Phoenix atterrissage sur Mars, comme on le voit par HiRISE. Bien que dans l'image elle semble être descendant dans le cratère, Phoenix fait atterri à 20 km de là.

L' atterrisseur Phoenix et son bouclier thermique comme on le voit par HiRISE.

Pistes du rover Opportunity, comme on le voit par HiRISE. Les points blancs sont des endroits où le rover arrêté pour effectuer des observations scientifiques ou tourné.

Opportunity vu par HiRISE le 29 Janvier, 2009. Opportunity est sur la voie de Endeavour cratère, à 17 km à ce point.
Le rover Curiosity lors de l'entrée atmosphérique vu par HiRISE le 6 Août 2012. parachute supersonique et backshell visible.
Circuler eau salée
Le 4 Août 2011 (sol 2,125), la NASA a annoncé que MRO détecté ce qui semble être qui coule de l'eau salée à la surface ou sous la surface de Mars.