
Phoenix (nave espacial)
Acerca de este escuelas selección Wikipedia
Voluntarios SOS ayudaron a elegir artículos e hicieron otro material curricular Visita el sitio web de Aldeas Infantiles SOS en http://www.soschildren.org/
 Impresión de la nave espacial Phoenix de la artista como ella aterriza en Marte | |
| Operador | NASA |
|---|---|
| Los principales contratistas | Lockheed Martin |
| Tipo de Misión | Lander |
| Fecha de lanzamiento | 4 de agosto de 2007 |
| Vehículo de lanzamiento | Delta II 7925 |
| Duración de la misión | 90 soles, 92,46 días |
| Decaimiento orbital | 25 de mayo 2008 (Suave aterrizaje en Marte ) |
| COSPAR ID | 2007-034A |
| Página principal | http://phoenix.lpl.arizona.edu/ |
| Masa | 350 kg |
Phoenix es un nave espacial robótica en una exploración espacial misión en Marte bajo la Programa Explorador de Marte. Los científicos que realizan la misión están utilizando los instrumentos a bordo del Phoenix lander para buscar entornos adecuados para microbiano vida en Marte, y para investigar la historia del agua allí. El programa interinstitucional está encabezada por el Laboratorio Lunar y Planetario de la Universidad de Arizona, bajo la dirección de la NASA 's Jet Propulsion Laboratory. El programa es una asociación de universidades en el Estados Unidos , Canadá , Suiza , Dinamarca , Alemania , el Reino Unido , la NASA, la Agencia Espacial Canadiense, la Instituto Meteorológico de Finlandia, Lockheed Martin Space Systems, MacDonald Dettwiler & Associates (MDA) y de otras empresas del sector aeroespacial.
Phoenix es el sexto aterrizaje exitoso en Marte, de doce intentos totales (siete de los cuales eran estadounidenses). Es el más reciente nave espacial para aterrizar con éxito en Marte. Es también el primer aterrizaje exitoso en una región polar de Marte.
Descripción general del programa

La misión tiene dos objetivos. Uno de ellos es el estudio de la geología historia del agua, la clave para desentrañar la historia de pasado el cambio climático . La segunda es la búsqueda de evidencia de un zona habitable que pueda existir en la frontera de hielo del suelo, el "filón biológico." instrumentos Phoenix 's son adecuados para descubrir información sobre la historia geológica y posiblemente biológica del Ártico marciano. Phoenix será la primera misión para devolver datos desde cualquiera de los polos, y contribuirán a la estrategia principal de la NASA para la exploración de Marte, "Siga el agua."
Se prevé que la misión principal para durar 90 soles (días marcianos) - Un poco más de 92 días de la Tierra. Los investigadores esperan que el módulo de aterrizaje va a sobrevivir en el invierno marciano para que pueda ser testigo de hielo polar en desarrollo en el área de exploración de la nave espacial. Tanto como tres pies de dióxido de carbono sólido hielo podrían aparecer en el área. Incluso si sobrevive parcialmente en el invierno, es muy poco probable que el módulo de aterrizaje funcionará durante todo el invierno debido al frío intenso. La misión fue elegido para ser un módulo de aterrizaje fijo en lugar de un vehículo debido a que:
- los costos se redujeron a través de la reutilización de los equipos anteriormente;
- la zona de Marte donde Phoenix es el aterrizaje se piensa que es relativamente uniforme y viajando por tanto es de menor valor; y
- el peso del equipo que se requeriría para que Phoenix para viajar en lugar se puede dedicar a más y mejores instrumentos científicos.
Los 2003-2004 observaciones de metano del gas en Marte se hicieron de forma remota por tres equipos que trabajan con datos separados. Si el metano está realmente presente en el atmósfera de Marte, entonces algo debe estar produciendo en el planeta ahora, ya que el gas se descompone por la luz solar dentro de 300 años, por lo tanto, la importancia de buscar potencial biológico o habitabilidad de los suelos del ártico marciano. El metano también podría ser el producto de una geoquímica proceso o el resultado de volcánica o actividad hidrotermal. Otras misiones futuras nos pueden permitir descubrir si la vida existe de hecho en Marte hoy.
Historia del programa


Mientras se estaba escribiendo la propuesta de Phoenix, el Mars Odyssey Orbiter utiliza su espectrómetro de rayos gamma y encontró la firma distintiva de hidrógeno en alguna superficie marciana. La única fuente plausible de hidrógeno sería el agua en forma de hielo, congelado por debajo de la superficie de Marte. La misión fue financiada en la expectativa de que Phoenix podría encontrar hielo de agua en las llanuras árticas de Marte. En agosto de 2003 la NASA seleccionó el Universidad de Arizona "Phoenix" misión para su lanzamiento en 2007. Se esperaba que este sería el primero de una nueva línea de más pequeño, de bajo costo, Misiones de exploración en la agencia de exploración de Marte programa. La selección fue el resultado de una intensa competencia por dos años con propuestas de otras instituciones. El premio $ 325,000,000 NASA es más de seis veces más grande que cualquier otra beca de investigación único en la historia de la Universidad de Arizona.
Peter H. Smith de la Universidad de Arizona Laboratorio Lunar y Planetario, como investigador principal, junto con 24 co-investigadores, fueron seleccionados para dirigir la misión. La misión fue nombrado después de la Phoenix, un ave mitológica que renace varias veces de sus propias cenizas. La nave espacial Phoenix contiene varios componentes previamente construidos. El módulo de aterrizaje utilizado para la misión 2007-08 se modificó el Mars Surveyor 2001 Lander (cancelado en 2000), junto con varios de los instrumentos tanto de eso y el éxito anterior Misión Mars Polar Lander. Lockheed Martin, que construyó el módulo de aterrizaje, había mantenido el módulo de aterrizaje casi completo en un ambiente controlado habitación limpia a partir de 2001 hasta que la misión fue financiada por la NASA Programa Scout.
Phoenix es una asociación de universidades, centros de la NASA, y la industria aeroespacial. Los instrumentos de la ciencia y las operaciones serán un Universidad de responsabilidad Arizona. NASA 's Jet Propulsion Laboratory de en Pasadena, California, gestionará el proyecto y de diseño de la misión y control. Lockheed Martin Space Systems, de Denver, Colorado , construido y probado la nave espacial. La Agencia Espacial Canadiense proporcionará una estación meteorológica, incluyendo un innovador láser -basado sensor atmosférico. Las instituciones co-investigador incluyen Sistemas Malin Space Science (California), Instituto Max Planck para la Investigación del Sistema Solar (Alemania), Centro de Investigación Ames de la NASA (California), Centro Espacial Johnson de la NASA (Texas), MDA (Canadá), Optech Incorporated (Canadá), Instituto SETI, Texas A & M University, Universidad de Tufts, Universidad de Colorado, Universidad de Copenhague ( Dinamarca ), Universidad de Michigan, Universidad de Neuchâtel ( Suiza ), Universidad de Texas en Dallas, Universidad de Washington, Universidad de Washington en St. Louis, y La Universidad de York (Canadá). Científicos de Imperial College de Londres y la Universidad de Bristol han proporcionado hardware para la misión y serán parte del equipo que opera la estación microscopio.
En 2 de junio de 2005 , tras una revisión crítica de los avances de planificación del proyecto y el diseño preliminar, la NASA aprobó la misión de actuar como estaba previsto. El propósito de la revisión era confirmar la confianza de la NASA en la misión.
Lanzamiento


Phoenix fue lanzada el 04 de agosto 2007 , a las 05:26:34 am EDT (09:26:34 UTC) en un Delta 7925 lanzamiento del vehículo de Plataforma 17-A de la Estación de la Fuerza Aérea de Cabo Cañaveral. El lanzamiento fue nominal sin anomalías significativas. La sonda Phoenix se colocó en un trayectoria de tal precisión que su quemadura corrección del rumbo primera trayectoria, realizado en 10 de agosto de 2007 a las 7:30 am EDT (11:30 GMT), fue sólo 18 m / s. El lanzamiento tuvo lugar durante una ventana de lanzamiento se extiende desde 03 de agosto 2007 a 24 de agosto 2007 . Debido a la ventana de lanzamiento pequeña reprogramado el lanzamiento de la Misión Dawn (originalmente prevista para 7 de julio) tuvo que dimitir y se puso en marcha después de que Phoenix en septiembre. La Delta 7925 fue elegido debido a su exitosa historia lanzamiento, que incluye lanzamientos del Spirit y Opportunity Mars Exploration Rovers en 2003 y Mars Pathfinder en 1996.
La nubes noctilucentes fue creado por la gas de escape de la Delta II 7925 cohete utilizado para lanzar Phoenix. La nube asumió no sólo el aspecto de la mítica ave fénix, sino también la rojo y colores azules del logotipo de Phoenix Mars Lander. Los colores en la nube formada por el efecto de prisma de las partículas de hielo presentes en el camino de escape.

Aterrizaje
La Jet Propulsion Laboratory de hacer ajustes a las órbitas de tres satélites alrededor de Marte para estar en el lugar correcto en 25 de mayo de 2008 para observar Phoenix, ya que entró en la atmósfera y vigilar que hasta un minuto después de aterrizar. Esta información permitirá un mejor diseño para futuros aterrizadores. La zona de aterrizaje prevista era una elipse 100 kilometros en 20 km que cubren terreno que ha sido nombrado informalmente " Green Valley "y puede contener la mayor concentración de hielo de agua fuera de los polos.
Phoenix entrado en la atmósfera marciana a cerca de 21.000 km (13.000 millas) por hora, y en 7 minutos tenía que ser capaz de disminuir su velocidad a 8 km (5 millas) por hora antes de aterrizar en la superficie. La confirmación de la entrada en la atmósfera fue recibido en 16:46 PDT (23:46 UTC). Las señales de radio recibidas en 04:53:44 pm PDT confirmó que Phoenix había sobrevivido a su difícil descenso y aterrizó 15 minutos más temprano, completando así una 680.000.000 kilometros (422 millones millas) de vuelo desde la Tierra.
Despliegue del paracaídas fue aproximadamente 7 segundos más tarde de lo esperado, lo que lleva a una posición de aterrizaje algunos 25-28 km de largo (este), cerca de la orilla de la predicho 99% elipse de aterrizaje. La razón de este retraso aún no es de conocimiento público.
Mars Reconnaissance Orbiter de Alta Resolución Experimento Científico de Imágenes (HiRISE) de la cámara fotografió Phoenix suspendido de su paracaídas durante su descenso a través de la atmósfera marciana. Esto marca la primera vez en la historia una nave ha fotografiado otro en el acto de aterrizar en un planeta (la Luna no es un planeta, sino un satélite). La misma cámara también fotografiada Phoenix en la superficie con una resolución suficiente para distinguir el módulo de aterrizaje y sus dos arreglos de celdas solares. Los controladores de tierra utilizados Datos de seguimiento Doppler de Odyssey y Mars Reconnaissance Orbiter para determinar la ubicación precisa de la sonda como 68.218830 ° N 234.250778 ° E. El lugar de aterrizaje es aquí en la Google Mars mapa basado en la web y aquí en la NASA World Wind espectador planetaria (libre instalación requiere; "MOLA Color (ASU)" es la imagen de Google).


Phoenix aterrizó en el Valle Verde de Vastitas Borealis sobre 25 de mayo de 2008 , a finales de la primavera del hemisferio norte de Marte ( L s = 76.73), donde el Sol brillará en sus paneles solares todo el día marciano. Por el solsticio de verano del hemisferio norte marciano ( 25.06.2008), el Sol aparecerá en su elevación máxima de 47,0 grados. Phoenix experimentará su primera puesta de sol en el comienzo de septiembre de 2008.
El aterrizaje se hizo sobre una superficie plana, con el módulo de aterrizaje de informes sólo 0,3 grados de inclinación. Justo antes del aterrizaje, la nave utilizó sus propulsores para orientar sus paneles solares a lo largo de un eje este-oeste para maximizar la generación de energía. El módulo de aterrizaje esperó 15 minutos antes de la apertura de sus paneles solares, para evitar que el polvo se asiente. Las primeras imágenes de la sonda se dispuso alrededor de las 7:00 pm PDT ( 2008-05-26 02:00 UTC). Las imágenes muestran una superficie sembrada de guijarros y incisa con pequeñas depresiones en polígonos de unos 5 m de ancho y 10 cm de alto, con la ausencia prevista de grandes rocas y colinas.
Al igual que la época de 1970 Vikingo nave espacial, Phoenix utiliza los motores de cohete para su descenso final. Los experimentos llevados a cabo por Nilton Renno, misión co-investigador de la Universidad de Michigan, y sus estudiantes han investigado cuánto polvo superficial se levantaban en el aterrizaje. Investigadores de la Universidad de Tufts, dirigido por el co-investigador Sam Kounaves, estarán llevando a cabo experimentos adicionales en profundidad para identificar el alcance de la contaminación amoníaco del propelente hidracina y sus posibles efectos sobre los experimentos de química. En 2007, un informe al Sociedad Astronómica Americana por Profesor de la Universidad del Estado de Washington Dirk Schulze-Makuch, sugirió que Marte podría albergar peróxido - formas de vida basadas en el que las sondas Viking no lograron detectar debido a la química inesperada. La hipótesis fue propuesta mucho después de cualquier modificación a Phoenix podrían hacerse. Uno de los investigadores de la misión Phoenix, astrobiólogo de la NASA Chris McKay, dijo que el informe "despertó su interés", y que se buscaría maneras de probar la hipótesis con instrumentos Phoenix 's.
Misión de superficie
Comunicaciones de la superficie
Primer movimiento del brazo robótico se retrasó por un día en que, en 27 de mayo de 2008 , los comandos de la Tierra no fueron transmitidas a la sonda Phoenix en Marte. Los comandos fueron a Orbitador de Reconocimiento de Marte de la NASA, como estaba previsto, pero el sistema de radio UHF Electra del orbitador para retransmitir órdenes a Phoenix cerraron temporalmente. Sin nuevos comandos, el módulo de aterrizaje en lugar llevó a cabo un conjunto de comandos de actividades enviado 26 de mayo como una copia de seguridad. En 27 de mayo del Mars Reconnaissance Orbiter retransmitió imágenes y otra información de esas actividades a la Tierra.
"Phoenix está en perfecto estado de salud" JPL de Barry Goldstein, director del proyecto Phoenix, dijo el miércoles por la mañana, 28 de mayo de 2008 .
Científicos que lideran la misión Phoenix a Marte de la NASA, de la Universidad de Arizona en Tucson envían comandos a unstow su brazo robótico y tomar más imágenes de su lugar de aterrizaje en 28 de mayo.
"Nos parecen haber aterrizado en el que tenemos acceso a cavar un polígono A través del largo camino, cavando a través de la pila, y la excavación en el centro de un polígono Hemos dedicado este polígono como el primer sistema de parques nacionales en Marte. - una zona de "mantener fuera" hasta que sepamos mejor manera de utilizar este recurso marciano natural ", Imager coinvestigador Marcos de Lemmon Texas A & M University, dijo.
El brazo robótico fue una parte fundamental de la misión Phoenix a Marte. Fue necesario para surcar en las capas de hielo polar del norte de Marte y entregar muestras a los instrumentos que analizar qué Marte es de, lo que su agua es como, y si es o ha sido alguna vez un posible hábitat para la vida.
Gerente brazo robótico Bob Bonitz del Laboratorio de Propulsión a Chorro de la NASA en Pasadena, California., Explicó cómo el brazo se iba a desestiba en Mayo 28. "Es una serie de siete movimientos, comenzando con la rotación de la muñeca para soltar el antebrazo de su moderación lanzamiento. Otra serie de movimientos suelta el codo de sus restricciones de lanzamiento y mueve el codo de debajo de la biobarrera."
La craqueo poligonal en esta zona previamente se había observado desde la órbita, y es similar a los patrones observados en áreas de permafrost en las regiones polares de altitud y altas de la Tierra . Un mecanismo de formación probable es que los contratos de hielo de permafrost cuando la temperatura disminuye, creando un patrón poligonal de grietas, que se llenan por tierra suelta que cae desde arriba. Cuando la temperatura aumenta y el hielo se expande de nuevo a su anterior volumen, por lo tanto no puede asumir su antigua forma, pero se ve obligado a ceder hacia arriba. (En la Tierra, el agua líquida probablemente entraría en ocasiones junto con el suelo, creando perturbación adicional debido a acuñamiento de hielo cuando el contenido de las grietas se congelan.)
Brazo robótico del Lander tocó tierra en el planeta rojo por primera vez en 31 de mayo de 2008 . Se recogió la suciedad y comenzó el muestreo del suelo marciano para el hielo. El brazo robótico empezó a cavar después de días de pruebas. Brazo robótico Cámara de Phoenix tomó una imagen debajo del módulo de aterrizaje en Sol 5 (ver abajo) que muestra manchas de la superficie lisa brillante descubierto cuando escape propulsor voló tierra suelta suprayacente. Se especula que esto puede ser hielo . Ray Arvidson de la Universidad de Washington en St. Louis dijo: "Podríamos muy bien estar viendo roca, o podríamos estar viendo hielo expuesto en la zona de la explosión retrorocket."
Posible presencia de hielo de agua subterránea poco profunda
En 19 de junio de 2008 , la NASA anunció que los dados de tamaño grumos de material brillante en la trinchera "Dodo-Goldilocks" excavado por el brazo robótico habían desaparecido durante el transcurso de cuatro días, lo que sugiere que estaban compuestas de hielo de agua que sublimada exposición siguiente (ver imágenes abajo). Mientras que el hielo seco se sublima también, en las condiciones que presentan lo haría a un ritmo mucho más rápido que el observado.
Química Wet
En 24 de junio de 2008 , los científicos de la NASA puso en marcha una importante serie de pruebas. El brazo robótico recogió más suelo y lo entregó a 3 diferentes analizadores de a bordo: un horno que cuece y probó los gases emitidos, una cámara microscópica, y un laboratorio de química húmeda. Brazo robótico primicia del aterrizador se posicionó sobre el embudo entrega Wet laboratorio de química sobre el Sol 29 (el día marciano 29 después del aterrizaje, es decir, 24 de junio de 2008 ). El suelo fue transferido al instrumento sobre el Sol 30 ( 25 de junio 2008), y Phoenix realizaron las primeras pruebas de química húmeda. En Sol 31 ( 26 de junio 2008) Phoenix volvió los resultados de las pruebas de química húmeda con información sobre las sales en el suelo, y su acidez. El laboratorio de química húmeda es parte de la suite de herramientas llamado Microscopía, Electroquímica y Conductividad Analizador (MECA).
Los resultados de laboratorio de química húmeda preliminares mostraron la superficie del suelo es moderadamente alcalina, entre pH 8 y 9. magnesio, sodio, se encontró que los iones de potasio y cloruro; el nivel global de la salinidad es modesto. Los niveles de cloruro eran bajos, y por lo tanto la mayor parte de los aniones presentes no se identificaron inicialmente. El nivel de pH y salinidad eran vistos como benignos desde el punto de vista de la biología. Análisis TEGA de su primera muestra de suelo indica la presencia de agua unida y CO 2 que se libera durante la final (la más alta temperatura, 1.000ºC) ciclo de calentamiento.

Las dos primeras trincheras cavadas por Phoenix en suelo marciano. La zanja de la derecha, informalmente llamado "Baby Bear", es la fuente de la primero muestras entregados a TEGA y el microscopio óptico para el análisis.

Dados grumos de tamaño de material brillante en el ampliada trinchera "Dodo-Goldilocks" desaparecieron durante el transcurso de cuatro días, lo que implica que estaban compuestas de hielo, que sublimado después de la exposición.

Versiones de color de las fotos que muestran la sublimación del hielo, con la esquina inferior izquierda de la zanja ampliada en las inserciones en la parte superior derecha de las imágenes.

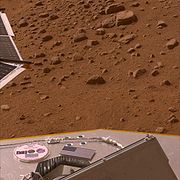
Phoenix imagen almohadilla plantar, a lo largo de 15 minutos después de aterrizar para asegurar que cualquier polvo que se levanta se había asentado.

Una de las primeras imágenes de la superficie de Phoenix.

Ver debajo lander hacia pata sur, mostrando exposiciones parcheadas de una superficie brillante, posiblemente hielo.
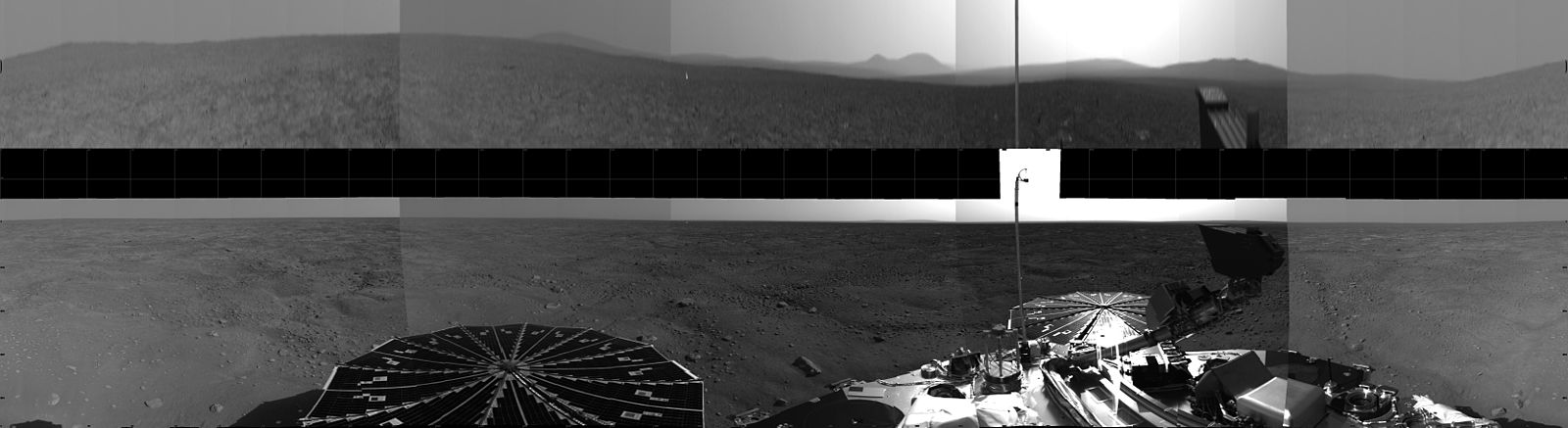
Un panorama de 360 grados montado a partir de imágenes tomadas en soles de 1 y 3 después del aterrizaje. La parte superior se ha estirado verticalmente por un factor de 8 a realzar los detalles. Visible cerca del horizonte a resolución completa son la carcasa posterior y el paracaídas (una mota brillante por encima del borde derecho del panel solar izquierda, a unos 300 metros de distancia) y el escudo térmico y su marca de rebote (dos rayas oscuras de extremo a extremo por encima de la centro de la matriz solar izquierda, a unos 150 metros de distancia); en el horizonte, a la izquierda del mástil meteorológico, es un cráter. (Desplácese a la derecha si usted no los ve inicialmente.)

Comparación entre polígonos fotografiados por Phoenix en Marte ...

... Y como fotografiado (en falso color) de la órbita de Marte ...

Descripción general del hardware
Sistemas Lander incluyen un RAD6000 sistema computarizado para el mando de la nave espacial y el manejo de datos y un sistema de telecomunicaciones digital que puede comunicarse directamente con la Tierra o por medio de Mars Odyssey, Mars Reconnaissance Orbiter , o Mars Express, todo ahora que usa turbo códigos de corrección de errores. Las interconexiones utilizan el Proximidad-1 protocolo.
Otras partes del módulo de aterrizaje son un sistema eléctrico que contiene paneles solares y baterías, un sistema de guía a la tierra de la nave espacial, ocho 1,0 lbf (4.4 N) y 5,0 lbf (22 N) monopropelente motores de hidrazina construido por Operaciones Aerojet-Redmond para la fase de crucero, doce 68,0 lbf (302 N) Aerojet propulsores de hidracina monopropelente a la tierra los elementos mecánicos y estructurales de Phoenix, y un sistema de control térmico para asegurar la nave espacial no quede demasiado frío.
El módulo de aterrizaje tiene una masa de 350 kg y mide 2,2 m de alto por 5,5 m de largo con sus paneles solares desplegados. La cubierta de la ciencia es de aproximadamente 1,5 m de diámetro.
De carga útil científica

Phoenix lleva versiones mejoradas de la Universidad de Arizona cámaras panorámicas e instrumentos volátiles-análisis de la malograda Mars Polar Lander, así como experimentos que había sido construido para el cancelado Mars Surveyor 2001 Lander, incluyendo un brazo JPL de excavación de zanjas robot, un conjunto de laboratorios de química húmeda, y microscopios de fuerza atómica y óptica. La carga científica también incluye una cámara de descenso y un conjunto de instrumentos meteorológicos.
Brazo robótico y cámara

El brazo robótico (RA) está diseñado para extender 2,35 m de su base en el módulo de aterrizaje, y tienen la capacidad de excavar hasta 0,5 m por debajo de la superficie. Tomará muestras de polvo y hielo que serán analizados por otros instrumentos en el módulo de aterrizaje. El brazo fue diseñado y construido para el Jet Propulsion Laboratory de la Alianza por Spacesystems, LLC (una subsidiaria de MacDonald Dettwiler & Associates (MDA)) en Pasadena, California. Los comandos fueron enviados por el brazo para ser desplegado en 28 de mayo de 2008 , comenzando con el echar a un lado de una cubierta de protección destinado a servir como medida de precaución redundante contra la contaminación potencial del subsuelo marciano por las formas de vida terrestres. La cámara del brazo robótico (RAC) unido al brazo robótico justo por encima de la primicia es capaz de tomar fotos a todo color de la zona, así como verificar las muestras que la primicia volverá, y examinar los granos de la zona donde la robótica Brazo sólo ha cavado. La cámara fue hecha por el Universidad de Arizona y Instituto Max Planck para la Investigación del Sistema Solar, Alemania .

Reproductor de imágenes estéreo de superficie
El Imager Surface Stereo (SSI) es la cámara principal en la nave espacial. Es un cámara estéreo que se describe como "una actualización de mayor resolución de la cámara termográfica se utiliza para Mars Pathfinder y la . Se espera Mars Polar Lander "tomar muchas imágenes estéreo del ártico marciano. También podrá, con el Sol como referencia, para medir la distorsión atmosférica de la Atmósfera marciana debido al polvo, aire y otras características. La cámara fue proporcionado por el Universidad de Arizona, en colaboración con la Instituto Max Planck para la Investigación del Sistema Solar.
Analizador de gas térmico y evolucionado

El térmica y Evolved Gas Analyzer (TEGA) es una combinación de un horno de alta temperatura con un espectrómetro de masas . Será utilizado para cocer las muestras de polvo marciano, y determinar el contenido de este polvo. Tiene ocho hornos, cada uno de aproximadamente el tamaño de un gran bolígrafo, que será capaz de analizar una muestra de cada uno, para un total de ocho muestras separadas. Los miembros del equipo pueden medir la cantidad de vapor de agua y dióxido de carbono se dan gas apagado, la cantidad de hielo de agua que contienen las muestras, y lo que los minerales están presentes que pueden haber formado durante un clima cálido húmedo pasado. El instrumento también será capaz de medir cualquier volátiles orgánicos, tales como metano , hasta 10 ppb. TEGA fue construido por el Universidad de Arizona y Universidad de Texas en Dallas.
El 29 de mayo de 2008, pruebas eléctricas indicaron un cortocircuito intermitente en TEGA. Específicamente, el fallo se encuentra en uno de los dos filamentos responsables de volátiles ionizante. NASA trabajó en torno al problema mediante la configuración de la copia de seguridad como el filamento-versa vice primaria y.
El 11 de junio la primera de las ocho hornos se llenó con la de una muestra de suelo tras varios intentos para obtener la muestra de suelo a través de la pantalla de TEGA. El 17 de junio, se anunció que el agua no se encuentra en esta muestra; sin embargo, ya que había sido expuesto a la atmósfera durante varios días antes de entrar en el horno, el hielo de agua inicial podría haber contenido pudo haber perdido a través sublimación.
Marte Descent Imager

The Mars Descent Imager ("MARDI") tenía la intención de tomar fotografías del lugar de aterrizaje durante los tres últimos minutos de descenso. Tal como estaba previsto originalmente, hubiera empezado a tomar fotos después de la aeroshell partió, a unos 8 km por encima del suelo marciano.
Antes del lanzamiento, las pruebas de la nave espacial montado descubrió un potencial problema de la corrupción de datos con una tarjeta de interfaz que fue diseñado para datos de imágenes de MARDI ruta, así como los datos de varias otras partes de la nave espacial. El problema potencial podría ocurrir si la tarjeta de interfaz iban a recibir una imagen MARDI durante una fase crítica del descenso final de la nave, en la que se podrían haber perdido los datos de punto de inercia Unidad de Medición de la nave; estos datos era fundamental para controlar el descenso y el aterrizaje. Esto se consideró un riesgo inaceptable, y se decidió no utilizar MARDI durante la misión. Como se descubrió la falla demasiado tarde para las reparaciones, la cámara sigue instalada en Phoenix; no se utilizó para tomar fotografías, ni se su micrófono incorporado utiliza.
Después del lanzamiento, un plan alternativo fue desarrollado para MARDI para capturar una sola imagen durante el descenso; pero se determinó que esto habría requerido cambios en el calendario de eventos durante el descenso, por lo que también se descartó el plan alternativo, a favor de la reducción del riesgo.
Imágenes de MARDI habían sido destinados para ayudar a determinar exactamente dónde el módulo de aterrizaje ha aterrizado, y posiblemente ayudar a encontrar objetivos científicos potenciales. También se iba a utilizar para saber si el área donde las tierras lander es típico del terreno circundante. MARDI fue construido por Malin Space Science Systems.
MARDI es la cámara más ligero y eficiente jamás aterrizar en Marte. Habría utilizado sólo 3 vatios de potencia durante el proceso de formación de imágenes, menos de la mayoría de otras cámaras espaciales. En un principio se había diseñado y construido para realizar la misma función en la Mars Surveyor 2001 Lander misión; después se canceló esa misión, MARDI pasó varios años en el almacenamiento hasta que se desplegó en la sonda Phoenix.
Microscopía, Electroquímica y Analizador de conductividad

La Microscopía, Electroquímica y Conductividad Analizador (MECA) es un paquete de instrumentos originalmente diseñado para el cancelado Mars Surveyor 2001 Lander misión. Se compone de una laboratorio de química húmeda (CMT), óptica y microscopio de fuerza atómica, y una térmica y eléctrica sonda de conductividad. La Jet Propulsion Laboratory de construido MECA. Un suizo consorcio liderado por la Universidad de Neuchatel contribuyó el microscopio de fuerza atómica.
El uso de MECA, investigadores examinarán las partículas del suelo tan pequeñas como 16 micras de ancho; Además, van a determinar la composición química de los iones solubles en agua en el suelo. Ellos medir la conductividad eléctrica y térmica de las partículas del suelo usando una sonda en la cuchara de brazo robótico.
Microscopio óptico
El microscopio óptico es capaz de tomar imágenes del regolito de Marte con una resolución de 256 píxeles / mm o 16 micras / píxel. El campo de visión del microscopio es un soporte de muestra de 2x2 mm a la que el brazo robótico entrega la muestra. La muestra se ilumina ya sea por 9 LEDs rojos, verdes y azules o por 3 LEDs que emiten luz ultravioleta. La electrónica para la lectura del chip CCD se comparten con la cámara del brazo robótico que tiene un chip CCD idénticos. La Universidad de Arizona diseñó el microscopio óptico.
Microscopio de fuerza atómica
La microscopio de fuerza atómica tiene acceso a un área pequeña de la muestra entregada a la microscopio óptico. El instrumento explora sobre la muestra con uno de 8 de silicio consejos de cristal y mide la repulsión de la punta de la muestra. La resolución máxima será de 0,1 micras. Fue diseñado por el Universidad de Neuchâtel.
Laboratorio de química húmeda
Universidad Tufts desarrolló reactivos y sensores para el laboratorio de química húmeda. Imperial College de Londres proporcionó los sustratos de muestras microscopio.
El brazo robótico recoger un poco de tierra, lo puso en una de las cuatro células de laboratorio de química húmeda, en la que se añade agua, y mientras se agita, una serie de sensores electroquímicos medirá una docena de iones disueltos, tales como sodio , magnesio , calcio , y sulfato que han lixiviado del suelo en el agua. Esto proporcionará información sobre la compatibilidad biológica del suelo, tanto para posibles microbios indígenas y para los posibles futuros visitantes de la Tierra. Los sensores también medirán la pH y conductividad de la mezcla de agua y suelo, diciéndole si el suelo húmedo es súper ácida o alcalino y salado, o llena de oxidantes que pueden destruir la vida.
Cada célula de química húmeda tiene 26 sensores químicos y un sensor de temperatura. El polímero Ion Selective electrodos son capaces de determinar la concentración de iones midiendo el cambio de potencial eléctrico dentro del sensor, que está separada de la célula de química húmeda por una membrana selectiva de iones. Los dos electrodos de detección de gas para el oxígeno y el trabajo de dióxido de carbono en el mismo principio y se separan de la célula química húmeda por una membrana permeable a los gases. Una matriz de oro micro-electrodo se utiliza para la Voltametría cíclica y AVS. Cyclovoltammetry es un método para estudiar los iones mediante la aplicación de una forma de onda de la variación de potencial y la medición de la curva de corriente-voltaje. AVS primeros depósitos los metales sobre el electrodo de oro con un potencial aplicado. Después de que el potencial se invierte la corriente se mide mientras que los metales se quitaron el electrodo.
La primera medición se indica que la capa superficial contiene sales solubles en agua y tiene un pH entre 8 y 9.
Sensores térmicos y Sonda de conductividad (TECP)
La MECA contiene una sonda de conductividad térmica y eléctrica (TECP). TECP tiene cuatro sondas cortas de grasa y un puerto en el lado de la carcasa que hará que las siguientes mediciones:
- Suelo marciano (Regolito) Temperatura
- Humedad
- Conductividad térmica
- Conductividad eléctrica
- Permitividad dieléctrica
- Velocidad del viento
- La temperatura atmosférica
Tres de las cuatro sondas tienen elementos calefactores diminutos y sensores de temperatura dentro de ellos. Una sonda utiliza elementos de calentamiento internos para enviar un pulso de calor, registrando la vez que se envía el pulso y el control de la velocidad a la que el calor se disipa lejos de la sonda. Agujas adyacentes detectan cuando llega el pulso de calor. La velocidad que el calor se desplaza lejos de la sonda, así como la velocidad que se desplaza entre las sondas permite a los científicos para medir el calor conductividad térmica específica (la capacidad de la regolith para conducir el calor con respecto a su capacidad para almacenar calor) y la difusividad térmica (la velocidad a la que una perturbación térmica se propaga en el suelo).
Las sondas también medir la permitividad dieléctrica y conductividad eléctrica, que puede ser utilizado para calcular la humedad y la salinidad del regolito.
Agujas 1 y 2 trabajan en conjunto para medir sales en el regolito, calientan el suelo para medir las propiedades térmicas (conductividad térmica, calor específico y difusividad térmica) del regolito, y miden la temperatura del suelo. Agujas 3 y agua líquida 4 medida en el regolito. Aguja 4 es un termómetro de referencia para las agujas 1 y 2. Puerto 5 medidas de humedad relativa.
Estación meteorológica
La Estación Meteorológica (MET) registrará el tiempo diario durante el transcurso de la misión Phoenix. Está equipado con un indicador de viento y sensores de presión y temperatura. El MET también contiene una LIDAR (Light Detection and Ranging) dispositivo para el muestreo del número de partículas de polvo en el aire. Fue diseñado en Canadá y el apoyo de la Agencia Espacial Canadiense. Un equipo encabezado por Universidad de York se encargará de supervisar las operaciones científicas de la estación. El equipo de la Universidad de York incluye contribuciones de la Universidad de Alberta, Universidad de Aarhus ( Dinamarca ), Universidad de Dalhousie, Instituto Meteorológico de Finlandia, Optech, y el Servicio Geológico de Canadá. Fabricante Canadabrazo MacDonald Dettwiler and Associates (MDA) de Richmond, BC construyeron el MET.


La superficie de la velocidad del viento, presión y temperaturas también serán monitoreados durante la misión (de la testigo, sensores de presión y temperatura) y mostrar la evolución de la atmósfera con el tiempo. Para medir polvo y hielo contribución a la atmósfera, una LIDAR se emplea. El LIDAR recopila información acerca de la estructura dependiente del tiempo de la capa límite planetaria mediante la investigación de la distribución vertical de polvo, hielo, niebla y nubes en la atmósfera local.
Hay tres sensores de temperatura ( termopares) en un mástil vertical 1 m (mostrados a la izquierda en su posición estibado) en alturas de aproximadamente 250, 500 y 1000 mm por encima de la cubierta de módulo de aterrizaje. Los sensores están referenciados a una medición de la temperatura absoluta en la base del mástil. Un sensor de presión construido por el Instituto Meteorológico de Finlandia se encuentra en la caja de la electrónica de carga útil, que se encuentra en la superficie de la cubierta, y alberga la electrónica de adquisición para la carga útil MET. Los sensores de presión y temperatura inició sus operaciones el Sol 0 ( 26 de mayo de 2008 ), y operan de forma continua, el muestreo de una vez cada 2 segundos.
El Telltale es un instrumento danés canadiense conjunta (a la derecha), que proporciona una estimación curso de velocidad y dirección del viento. La velocidad se basa en la cantidad de desviación de la vertical que se observa, mientras que la dirección del viento se proporciona por el cual se produce este modo deflexión. Un espejo, situada bajo el revelador, y una "cruz", por encima de calibración (como se observa a través del espejo) se emplean para aumentar la precisión de la medición. Cualquiera de los de SSI o RAC cámaras pueden hacer esta medición, aunque el primero se utiliza normalmente. Observaciones periódicas tanto de día como de noche ayuda en la comprensión de la variabilidad diurna del viento en el lugar de aterrizaje de Phoenix.

El señalador verticales LIDAR detecta varios tipos de retrodispersión (por ejemplo, la dispersión de Rayleigh y Mie Scattering), con el retraso entre la generación de pulsos de láser y el regreso de la luz dispersada por las partículas atmosféricas que determinan la altitud a la que se produce la dispersión. Información adicional puede ser obtenida de la luz retrodispersada en diferentes longitudes de onda (colores), y el sistema de Phoenix transmite tanto 532 nm y 1064 nm. Tal dependencia de longitud de onda puede hacer que sea posible discriminar entre el hielo y el polvo, y servir como un indicador del tamaño de partícula eficaz.
El láser Phoenix LIDAR es un pasivo Q-switched Nd: YAG con las longitudes de onda duales de 1.064 nm y 532 nm. Se opera a 100 Hz con una amplitud de impulso de 10 ns. La luz dispersada es recibida por dos detectores que operan (verde y IR) y la señal verde se recoge en ambos modos de conteo de fotones y analógicas.
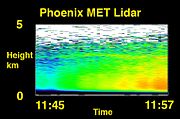
El LIDAR fue operado por primera vez al mediodía del Sol 3 ( 29 de mayo de 2008 ), registrando el perfil atmosférico extraterrestre primera superficie. Este primer perfil indicado polvo bien mezclado en los primeros kilómetros de la atmósfera, donde la capa límite planetaria se observó por una marcada disminución en la dispersión de la señal. El gráfico de contorno (derecha) muestra la cantidad de polvo en función del tiempo y la altitud, con colores cálidos (rojo-naranja) que indica más polvo y colores fríos (azul-verde), lo que indica menos polvo. También hay un efecto instrumentación del láser calentamiento, provocando la aparición de polvo aumentando con el tiempo. Una capa de 3,5 kilometros se puede observar en la gráfica, que podría ser el polvo extra, o menos probable, dado el tiempo de sol de esta fue adquirida, una nube baja altura de hielo.
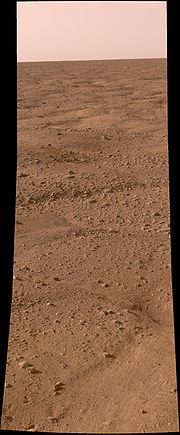
La imagen de la izquierda muestra el LIDAR operando en Marte, con su telescopio (tubo negro grande); ventana de láser (tubo pequeño en primer plano); envuelto en su manta térmica. El sistema con la tapa cerrada se muestra a continuación en la celebración del ( 1 de julio de 2008 ), Dia De Canada. La tonalidad rosada se debe a de recogida de polvo en el aire sobre la manta.
ElPhoenixDVD
Se adjunta a la cubierta del módulo de aterrizaje (junto a la bandera de Estados Unidos) es el " Phoenix DVD ", compilado por la Sociedad Planetaria. El disco contiene Visiones de Marte , una colección multimedia de la literatura y el arte sobre el planeta rojo. Los trabajos incluyen el texto de HG Wells ' guerra de los mundos (y el de radio transmitido por Orson Welles), de Percival Lowell Marte como la Morada de la Vida con un mapa de sus canales propuestos, de Ray Bradbury Crónicas marcianas , y Kim Stanley Robinson Verde Marte . También hay mensajes directamente dirigidas a los visitantes o los colonos marcianos futuros de, entre otros, Carl Sagan y Arthur C. Clarke. En 2006, la Sociedad Planetaria recogió un cuarto de millón nombres presentados a través de la Internet y los colocó en el disco, que afirma, en el frente, para ser "la primera biblioteca en Marte".
ElPhoenixDVD está hecho de un vidrio de sílice especial diseñado para soportar el ambiente marciano, con una duración de cientos (si no miles) de años en la superficie mientras espera descubridores.
El texto justo por debajo del centro del disco lee:
"Este archivo, proporcionado a la misión de la NASA Phoenix por la Sociedad Planetaria, contiene la literatura y el arte (Visiones de Marte), saludos de Marte visionarios de nuestro tiempo, y los nombres de los terrícolas del siglo 21 que querían enviar a sus nombres a Marte. Este DVD-ROM está diseñado para ser leído en las computadoras personales en 2007. La información se almacena en una ranura en espiral en el disco. Un rayo láser puede escanear la ranura cuando metalizado o un microscopio se puede utilizar. Muy pequeños baches y agujeros representan los ceros y unos de información digital. La ranura es de aproximadamente 0,74 micras de ancho. Para obtener más información, consulte el documento de estándares ECMA-268 (80 mm de DVD de sólo lectura de disco) ".