
La multiplication de matrices
Saviez-vous ...
SOS Enfants a fait cette sélection Wikipedia aux côtés d'autres écoles des ressources . Un lien rapide pour le parrainage d'enfants est http://www.sponsor-a-child.org.uk/
En mathématiques , la multiplication de matrices est l'opération consistant à multiplier un matrice soit avec un scalaire ou une autre matrice. Cet article donne un aperçu des différentes façons d'effectuer la multiplication de matrices.
Produit matriciel ordinaire
Ce est le moyen le plus souvent utilisé et le plus important de multiplier les matrices. Il est défini entre deux matrices que si le nombre de colonnes de la première matrice est le même que le nombre de rangées de la deuxième matrice. Si A est une matrice m -by- n et B est une matrice n -by- p, puis leur produit est une matrice de m -by- p désigné par AB (ou parfois A · B). Si C = AB et C i, j désigne l'entrée en C à la position (i, j), puis

pour chaque paire i et j avec 1 ≤ i ≤ M et 1 ≤ j ≤ p. Le système algébrique " unités de la matrice "résume les propriétés abstraites de ce genre de multiplication.
Calcul directement à partir de la définition
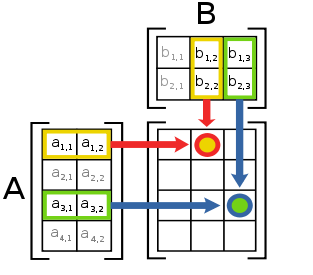
L'image de gauche montre comment calculer le (1,2) et l'élément (3,3) élément de AB si A est une matrice 4 × 2, et B est une matrice 2 × 3. Les éléments de chaque matrice sont appariés dans la direction des flèches; chaque paire est multiplié, et les produits sont ajoutés. L'emplacement du nombre résultant en AB correspond à la ligne et de la colonne qui ont été pris en considération.


Par exemple:

Procédé coefficients vecteurs
Cette multiplication de matrice peut également être considérée du point de vue légèrement différent: il ajoute des vecteurs ainsi après avoir été multiplié par différents coefficients. Si A et B sont des matrices donnés par:
 et
et 
puis

L'exemple revisité:


Les lignes de la matrice sont à gauche de la liste des coefficients. La matrice sur la droite est la liste des vecteurs. Dans l'exemple, la première ligne est [1 0 2], et donc nous prenons une fois le premier vecteur, 0 fois le second vecteur, et deux fois la troisième vecteur.
L'équation peut être simplifiée en utilisant en outre produits extérieurs:

Les termes de cette somme sont des matrices de la même forme, chacune décrivant l'effet d'une colonne de A et une rangée de B sur le résultat. Les colonnes de A peuvent être considérés comme un système de coordonnées de la transformation, ce est à dire étant donné un vecteur x nous avons  où
où  sont des coordonnées le long de la
sont des coordonnées le long de la  "Axes". Les termes
"Axes". Les termes  sont comme
sont comme  , Excepté
, Excepté  contient la i ième coordonnée pour chaque vecteur de colonne de B, dont chacun est indépendamment transformé en parallèle.
contient la i ième coordonnée pour chaque vecteur de colonne de B, dont chacun est indépendamment transformé en parallèle.
L'exemple revisité:


Les vecteurs  et
et  ont été transformés à
ont été transformés à  et
et  en parallèle. On pourrait aussi les transformer un par un avec les mêmes étapes:
en parallèle. On pourrait aussi les transformer un par un avec les mêmes étapes:

Méthode vectorielle listes
Le produit de la matrice ordinaire peut être considéré comme un dot produit d'une colonne liste des vecteurs et un rangée liste des vecteurs. Si A et B sont des matrices donnés par:
 et
et 
où
- A 1 est le vecteur ligne de tous les éléments de la forme a une, x A 2 est le vecteur ligne de tous les éléments de la forme a 2, x etc,
- et B 1 est le vecteur colonne de tous les éléments de la forme b x, 1 B 2 est le vecteur colonne de tous les éléments de la forme b x, 2 etc,
puis

Propriétés
La multiplication de matrices ne est pas commutative (ce est-à AB de la BA), sauf dans des cas particuliers. Il est facile de voir pourquoi: vous ne pouvez pas vous attendre à passer les proportions avec les vecteurs et obtenir le même résultat. Il est également facile de voir comment l'ordre des facteurs qui détermine le résultat, quand on sait que le nombre de colonnes dans la matrice des proportions doit être le même que le nombre de lignes de la matrice des vecteurs: ils doivent représenter le même nombre de vecteurs.
Bien que la multiplication de matrices ne est pas commutative, les déterminants de AB et BA sont toujours égaux (si A et B sont des matrices carrées de même taille). Voir l'article sur les déterminants pour une explication. Cependant la multiplication de matrices est commutative lorsque les deux matrices sont diagonale et de la même dimension.
Cette notion de multiplication est important parce que si A et B sont interprétées comme transformations linéaires (qui est presque universellement fait), puis le produit matriciel AB correspond à la composition des deux transformations linéaires, avec B étant appliqués en premier.
En outre, toutes les notions de la multiplication de matrices décrites ici part un ensemble de propriétés communes décrites ci-dessous.
Algorithmes
Le complexité de la multiplication de matrices, si elle est effectuée naïvement, est O (n ³), mais des algorithmes plus efficaces existent. L'algorithme de Strassen, conçu par Volker Strassen en 1969 et souvent appelée «la multiplication de matrices rapide", est basé sur une façon intelligente de multiplier deux matrices 2 × 2 qui exige seulement 7 multiplications (au lieu de l'habituel 8). Appliquant cette astuce donne de manière récursive un algorithme avec un coût de  . En pratique, cependant, il est rarement utilisé car il est difficile à mettre en œuvre et il manque stabilité numérique. Le facteur constant implicite dans le Comparaison asymptotique est d'environ 4,695.
. En pratique, cependant, il est rarement utilisé car il est difficile à mettre en œuvre et il manque stabilité numérique. Le facteur constant implicite dans le Comparaison asymptotique est d'environ 4,695.
Le algorithme avec l'exposant le plus bas connu, qui a été présenté par Don Coppersmith et Shmuel Winograd en 1990 , a une complexité asymptotique de O (n 2,376). Il est similaire à l'algorithme de Strassen: une façon intelligente est conçu pour multiplier deux matrices k × k avec moins de multiplications ³ k, et cette technique est appliquée de manière récursive. Il améliore le facteur constant dans l'algorithme de Strassen, réduisant à 4,537. Cependant, le terme constant impliqué dans le O (n 2,376) résultat est si grande que l'algorithme Coppersmith-Winograd ne vaut que pour les matrices qui sont trop gros pour gérer sur les ordinateurs actuels (Knuth, 1998).
Depuis ne importe quel algorithme pour multiplier deux matrices n × n doit traiter tous les 2 × n ² entrées, il ya une borne inférieure asymptotique des opérations Ω (n) ². Raz (2002) prouve une borne inférieure de  pour coefficient bornées circuits arithmétiques sur les nombres réels ou complexes.
pour coefficient bornées circuits arithmétiques sur les nombres réels ou complexes.
Cohn et al. (2003, 2005) mis des méthodes telles que les algorithmes Strassen et Coppersmith-Winograd dans un tout autre, théorie des groupes contexte. Ils montrent que si les familles de produits de couronnes de abélien avec des groupes symétriques satisfaisant certaines conditions existent, algorithmes matrice de multiplication avec une complexité quadratique essentielle existent. La plupart des chercheurs croient que ce est effectivement le cas (Robinson, 2005).
Multiplication scalaire
La multiplication scalaire d'une matrice A = (a ij) et un scalaire r r donne un produit A de la même taille que A. Les entrées de r A sont donnés par

Par exemple, si

puis

Si nous sommes préoccupés par les matrices sur une anneau, puis la multiplication ci-dessus est parfois appelé la multiplication gauche tandis que la droite multiplication est définie comme

Lorsque l'anneau sous-jacent est commutatif , par exemple, le champ de nombre réel ou complexe, les deux multiplications sont les mêmes. Toutefois, si l'anneau ne est pas commutative, telle que la quaternions, ils peuvent être différents. Par exemple

Produit Hadamard
Pour les deux matrices de mêmes dimensions, on a le produit de Hadamard, également connu sous le nom de produit et le produit entrywise Schur. Il peut être généralisée à tenir non seulement pour les matrices mais aussi pour les opérateurs. Le Hadamard produit de deux m -by- n matrices A et B, notée A • B est une matrice n m -by- donnée par (A • B) a ij ij = b ij. Par exemple
 .
.
Notez que le produit est un Hadamard sous-matrice du produit de Kronecker (voir ci-dessous).
Le produit Hadamard est commutative .
Le produit Hadamard est étudié par les théoriciens de la matrice, et il apparaît dans algorithmes de compression avec perte tels que JPEG, mais il est pratiquement épargnée par algébristes linéaires. Il est discuté dans (Horn & Johnson, 1994, Ch. 5).
Produit de Kronecker
Pour tout deux matrices arbitraires A et B, nous avons le produit direct ou Produit de Kronecker A ⊗ B défini comme
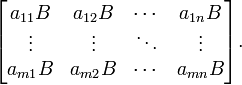
Notez que si A est m -by- n et B est de p r alors A ⊗ B est un mp -by- nr matrice. Encore une fois cette multiplication ne est pas commutative.
Par exemple
 .
.
Si A et B représentent des transformations linéaires V 1 → W 1 et W 2 → V 2, respectivement, alors A ⊗ B représente le produit tenseur des deux cartes, une V ⊗ V 2 → W 1 ⊗ W 2.
Propriétés communes
| Le Wikibook Le Livre de preuves mathématiques a une page sur le thème de: Les preuves de propriétés des matrices |
Tous les trois notions de multiplication de matrices sont associative :

et distributive:

et
 .
.
et compatible avec multiplication scalaire:



Notez que ces trois couples séparés d'expressions seront égaux entre eux que si la multiplication et l'addition sur le champ scalaire sont commutative, ce est à dire le champ scalaire est un anneau commutatif. Voir multiplication scalaire ci-dessus pour un contre-exemple comme le champ scalaire de quaternions.
Produit interne Frobenius
Le produit intérieur Frobenius, parfois notée A: B est le produit intérieur composante par composante de deux matrices comme se ils sont des vecteurs. En d'autres termes, ce est la somme des entrées du produit, ce est-Hadamard,

Ce produit intérieure induit la Norme de Frobenius.